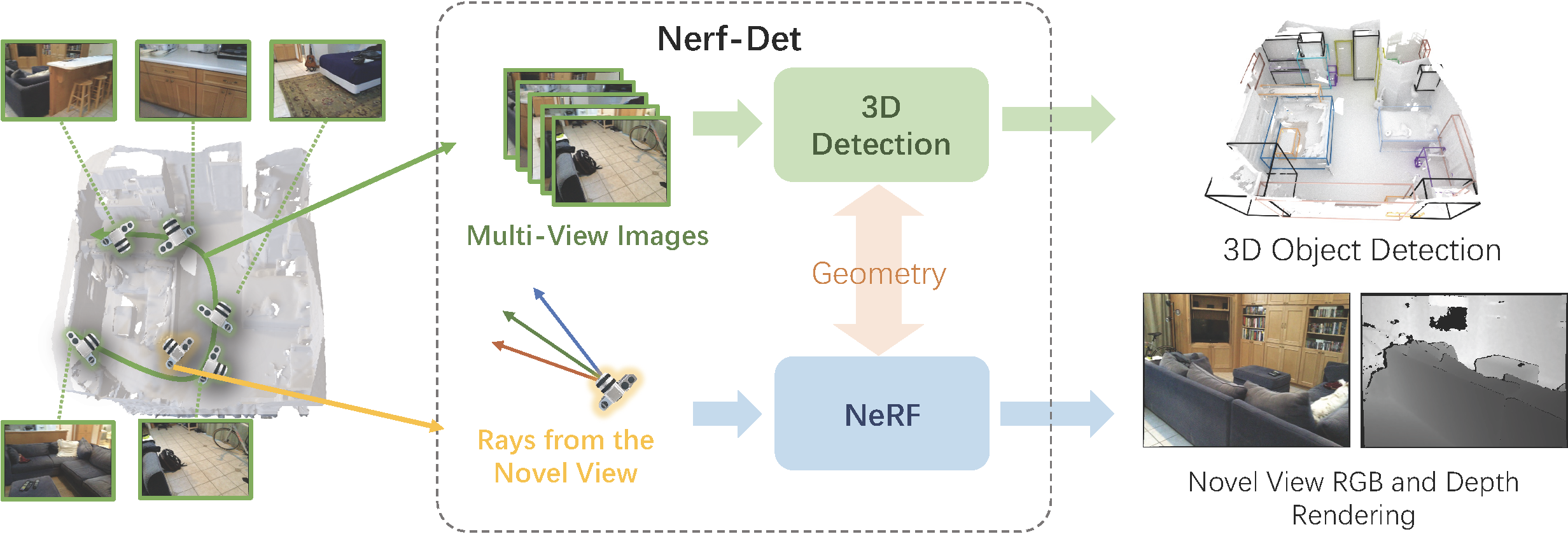
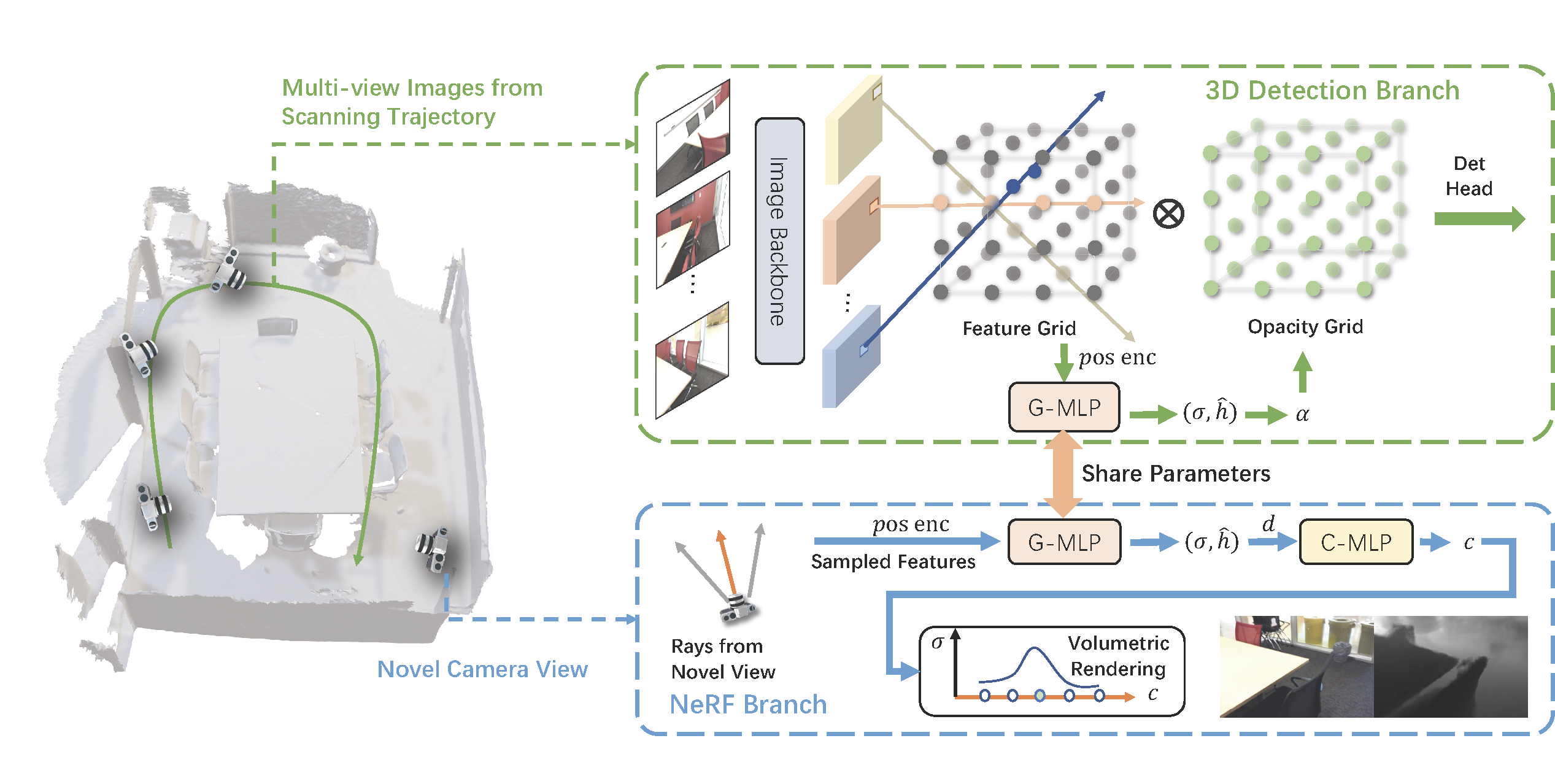
NeRF-Det is a novel method for 3D detection with posed RGB images as input. Our method makes novel use of NeRF in an end-to-end manner to explicitly estimate 3D geometry, thereby improving 3D detection performance. Specifically, to avoid the significant extra latency associated with per-scene optimization of NeRF, we introduce sufficient geometry priors to enhance the generalizability of NeRF-MLP. We subtly connect the detection and NeRF branches through a shared MLP, enabling an efficient adaptation of NeRF to detection and yielding geometry-aware volumetric representations for 3D detection. As a result of our joint-training design, NeRF-Det is able to generalize well to unseen scenes for object detection, view synthesis, and depth estimation tasks without per-scene optimization.
.png)
@inproceedings{xu2023nerfdet,
title={NeRF-Det: Learning Geometry-Aware Volumetric Representation for Multi-View 3D Object Detection},
author={Xu, Chenfeng and Wu, Bichen and Hou, Ji and Tsai, Sam and Li, Ruilong and Wang, Jialiang and Zhan, Wei and He, Zijian and Vajda, Peter and Keutzer, Kurt and Tomizuka, Masayoshi},
booktitle={ICCV},
year={2023},
}